Установили 5 сервоприводов на модель полноростового робота. Сервоприводы для двух плечевых суставов, для двух локтевых суставов и для поворота головы.

Запрограммировали работу сервоприводов. Теперь наша модель может отжиматься.
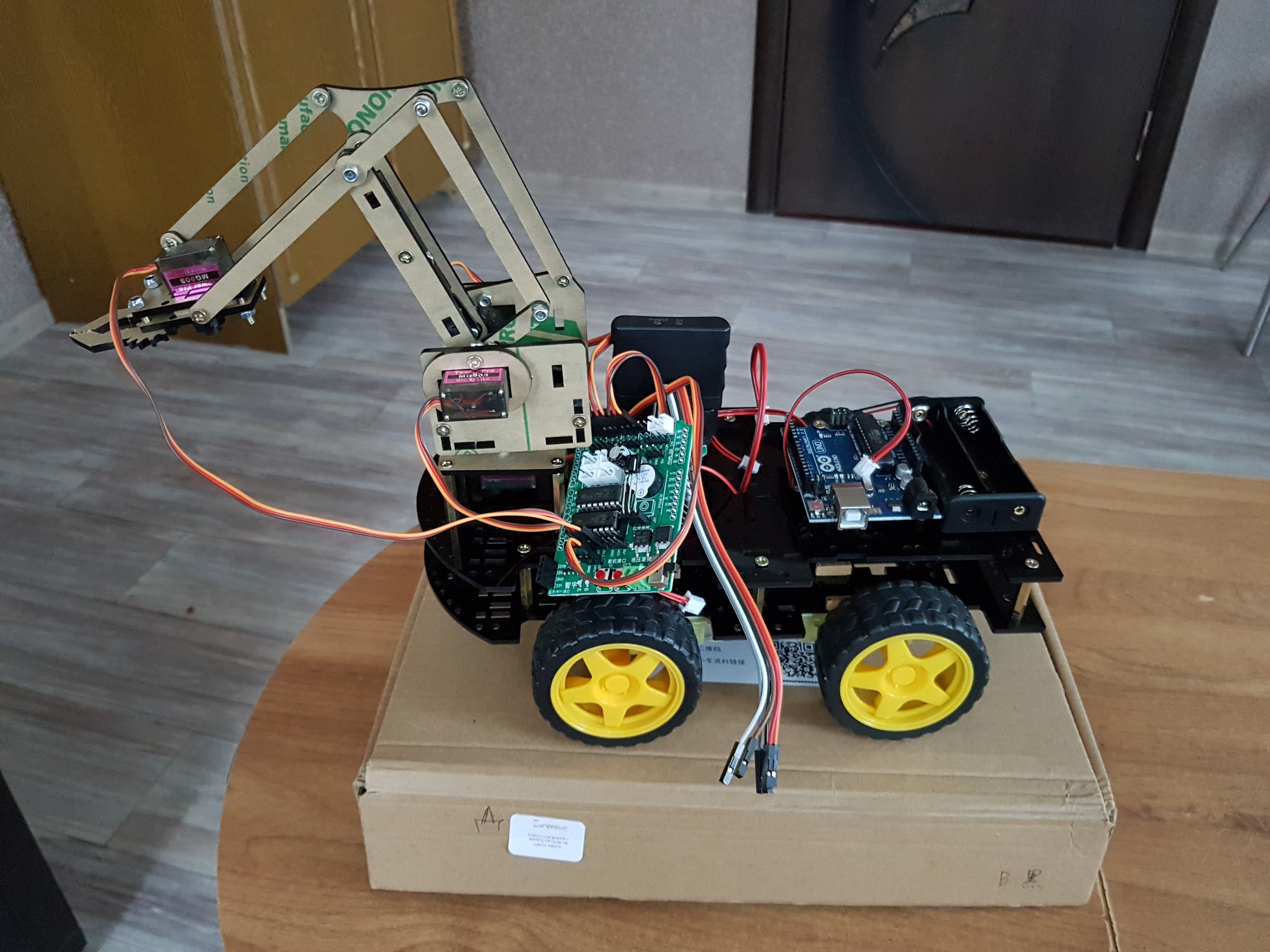
Собирали робот манипулятор, проверяли правильность установки и подключения двигателей. Провели пробные пуски моторов. Программировали моторы. Записали данные программы для движения робота в разных направлениях.
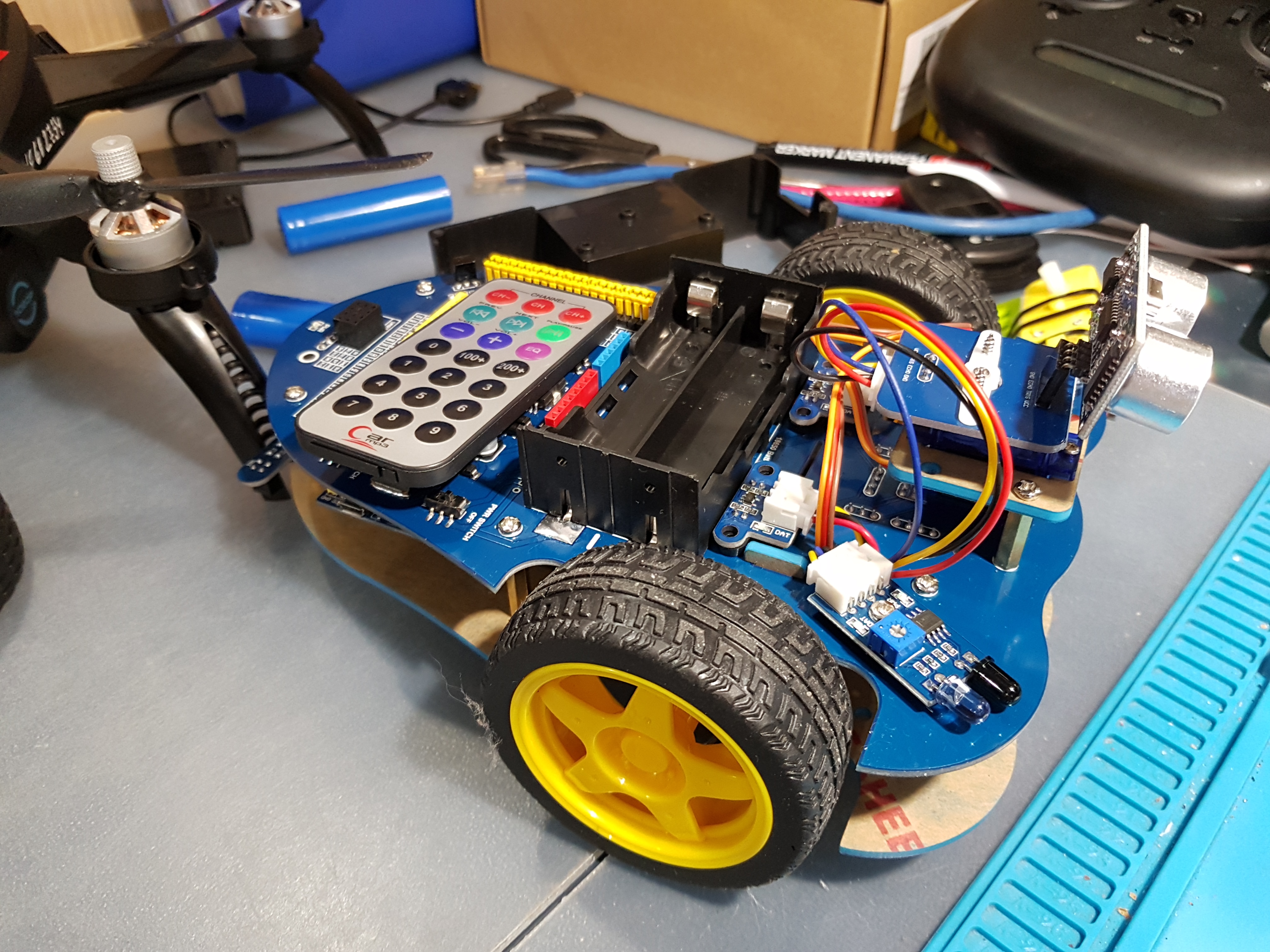
Продолжили сборку мобильного робота.
Создавали трассу для соревнования машин. Так же определяли правила соревнований.
Провели пробные соревнования. Выявили победителя и протестировали машины. Не все так просто как казалось.

Учили контент vr очков
Учили и разбирались в характеристиках и правилах пользования видеокамер.
Выполнили полеты на квадрокоптере.