На занятии проводились проверки технических характеристик радиоуправляемых машин. Скорость движения, радиус разворота, время работы батареи и др.
Разбирали характеристики манипулятора, какие сервоприводы за что отвечают и на какие углы поворачиваются для достижения заданной цели.
Собирали схему управления сервоприводом для движения головой робота. Экспериментально попробовали управлять головой робота по датчику. Получилось, что робот выполняет простые команды. Забавно.
Учились работать с vr шлемом.
Разбирали принципы управления квадрокоптером. Его характеристики и возможности. Оказалось камера wifi работает на частоте 5Ггц и не подходит к большинству телефонов.
Так же были и учебные полеты с пробной съемкой.
Так же разобрали гироскутер, чтоб понять какие детали надо изготовить для управления гироскутером дистанционно. Нашли гироскоп, нашли датчики веса, которые надо блокировать. Будем печатать площадку для гироскопа с возможностью наклона сервоприводом.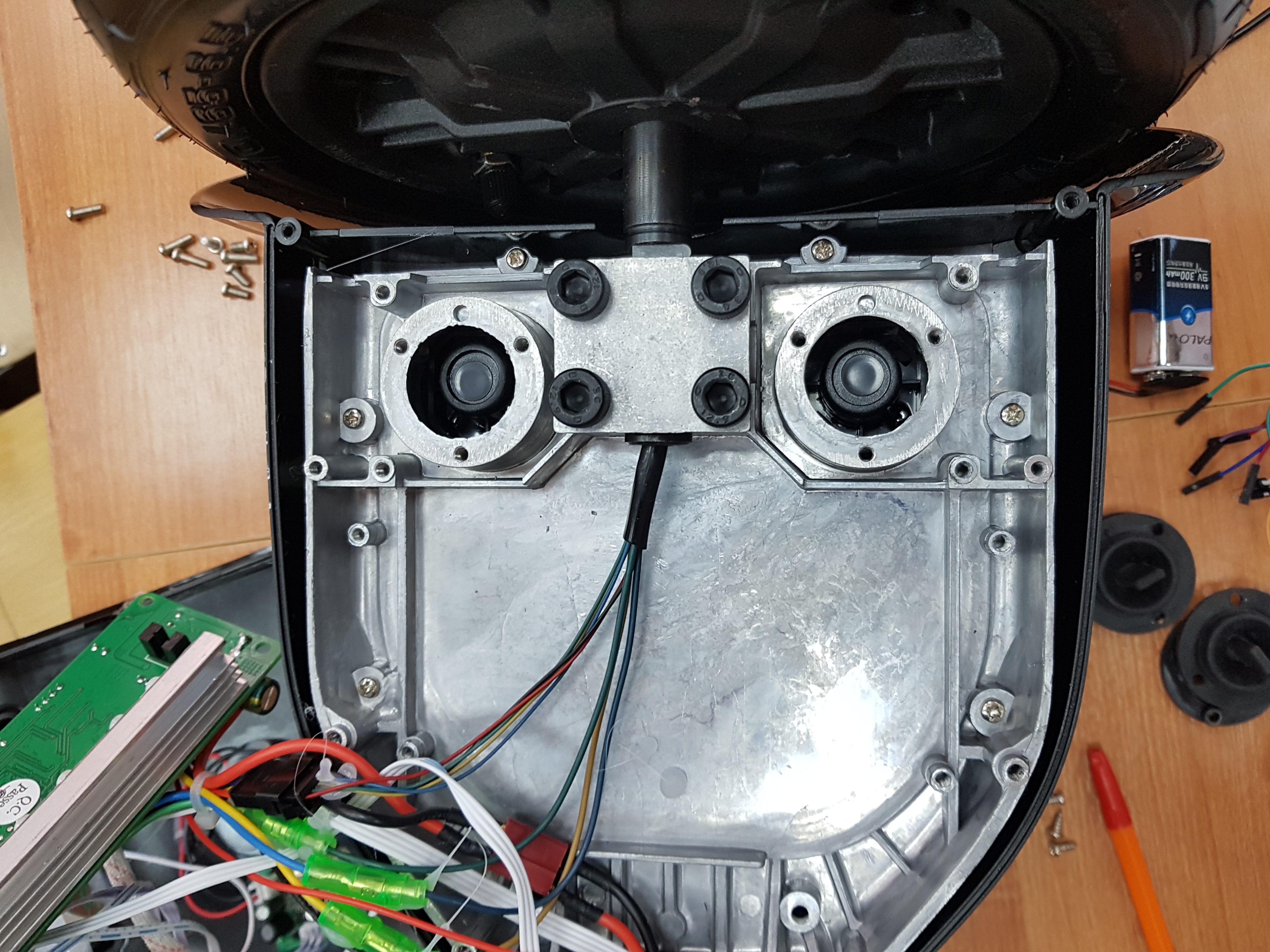
Получили новые конструкторы. Один собран для примера.

Так же работали над лего проектами. Устроили небольшую сценку.



Не все получилось как хотели. Есть над чем работать.